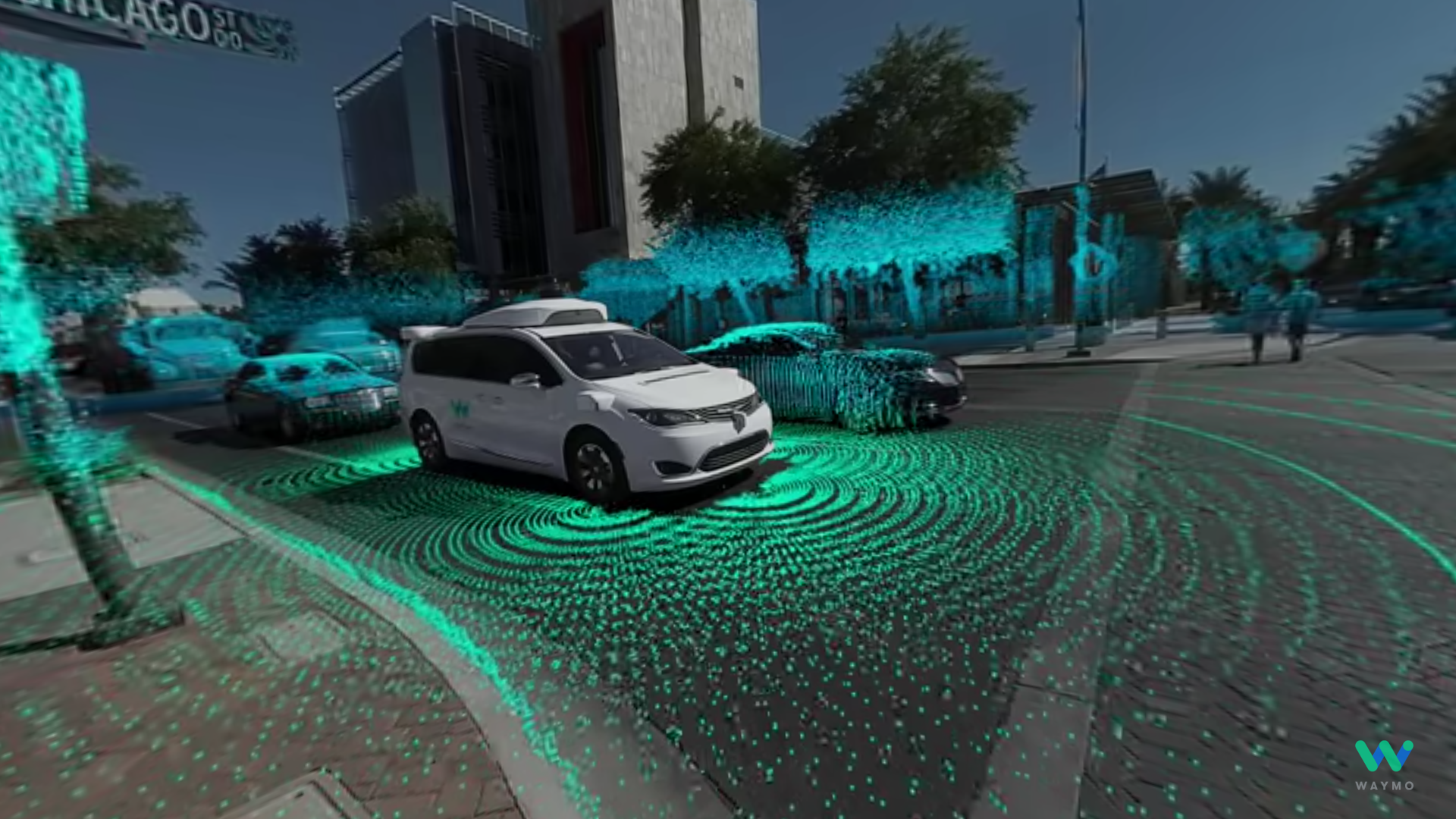
Waymoは無人タクシーの営業運転を始めたことを明らかにした。スマホでクルマを呼ぶと、ドライバーが搭乗していないWaymo自動運転車がやって来る (下の写真)。Google・Waymoは2009年から自動運転車を開発しているが、ついにこの技術が完成するに至った。

| 出典: Waymo |
無人タクシーとして運行開始
Waymoはアリゾナ州フェニックスで自動運転車の実証実験を続けている。これは「Early Ride Program」と呼ばれ、2017年11月からは無人タクシーとしての試験走行が始まった。しかし、無人タクシーといっても、安全のためにセーフティドライバーが搭乗し、緊急事態に備えていた。2018年3月からは、セーフティドライバーが搭乗しない、文字通り無人タクシーとして運行を開始した。
安全性をPRするビデオ
これに先立ち、Waymoは無人のクルマがどのように安全に走行できるのかを説明したビデオを公開した。ビデオはX-View形式で、クルマの周囲360度を見渡すことができる。スマホでこのビデオを見ると、クルマの前方だけでなく、体を回転させると側面から背後まで見ることができる。
クルマが認識する世界
ビデオはクルマに搭載されているセンサーが周囲のオブジェクトをどのように捉えるかを中心に構成されている。つまり、クルマのセンサーは何を見て、どのようにハンドルを切るのかを、グラフィカルに説明している。
Lidarが捉えるイメージ
クルマの眼の中心はLidar (レーザーセンサー) で、三種類のモデルが搭載されている。「Short-Range Lidar」はクルマの前後左右四か所に設置され、車両近傍のオブジェクトを認識する。クルマのすぐ近くにいる小さな子供などを把握する。解像度は高く、自転車に乗っている人のハンドシグナルを読み取ることができる。(下の写真、路上の緑色のポイントクラウドの部分。)
「Mid-Range Lidar」と「Long-Range Lidar」は屋根の上のドームの内部に搭載され、中長距離をカバーする。後者は可変式で、レーザービームがスキャンする角度を変えることができ、特定部分にズームインする。これらのLidarは周囲の車両や歩行者など把握し、最も重要なセンサーとなる。 (下の写真、青色のポイントクラウドの部分。)
| 出典: Waymo |
レーダーの機能
クルマはレーダーを搭載しており「Radar System」と呼ばれ、ミリ波を利用して路上のオブジェクトを把握する。ミリ波は水滴の中でも移動でき、雨や霧や雪のなかでも機能する。また、日中だけでなく夜間でも使うことができる。クルマの屋根の四隅に搭載され、周囲のオブジェクトまでの距離とその移動速度を把握する。 (下の写真、走行中や駐車中のクルマまでの距離と速度を表示。)

| 出典: Waymo |
高精度なカメラ
カメラは「Vision System」と呼ばれクルマの屋根のドームに格納されている。ダイナミックレンジの広いカメラの集合体で、8つのモジュール から構成される。カメラは信号機や道路標識を読むために使われる。 (下の写真、信号機を把握している。) モジュールは複数の高精度センサーから成り、ロードコーンのような小さなオブジェクトを遠方から検知できる。ダイナミックレンジが広く、暗いところから明るいところまでイメージを認識できる。

| 出典: Waymo |
PerceptionとPrediction:周囲の状況を理解
Waymoは複数のセンサーの情報を統合して周囲の構造を把握する。交差点では、周囲のクルマ、自転車、歩行者などのオブジェクトを把握する。また、信号機とその色を把握してそれに従う。更に、横断歩道や道路の路肩なども把握する。ソフトウェアは、これらオブジェクトが移動している方向、速度、加速度などを推定する。(下の写真、クルマは青色の箱で示され、その距離と移動速度を把握。クルマの走行経路を予想して、それを青色の実線で示す。右前方のクルマは「Police Car」と認識。歩行者は茶色の箱で示される。信号機は白色の枠で示され、「STOP」か「GO」かを認識する。)

| 出典: Waymo |
Planning:走行経路を決定
クルマ周囲のオブジェクトの動きを予想して、ソフトウェアは最適な走行ルートを決める。具体的には、Waymoの進行方向、速度、走るレーン、ハンドル操作を決定する。センサーが認識できる範囲は広く、フットボールコート二面先のヘルメットを識別できる。(下の写真右側、Waymoが認識する周囲のクルマとその予想進行経路。これを元にアルゴリズムはWaymoの進行経路を算出する。それが緑色の実線で表示されている。下の写真左側、同じシーンをシミュレータで表示したもの。)
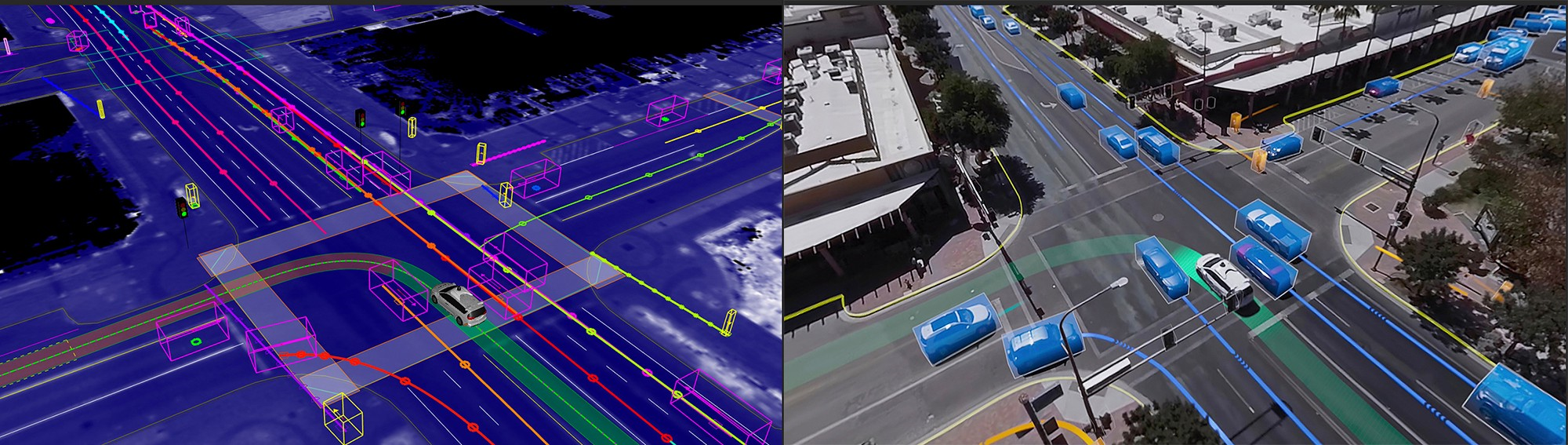
| 出典: Waymo |
安全運転をプログラミング
ソフトウェアは「Defensive Driving」としてプログラムされている。これは安全サイドのプログラミングを意味し、自転車と十分間隔を取るなど、慎重な運転スタイルに設定されている。運転スタイルがクルマの性格を決めるが、Waymoは安全第一にプログラミングされている。(下の写真、左折中に前方から自転車が接近してきたケース。自転車は桃色の箱で示され、距離は50フィートで速度は毎時9マイル。自転車の予想走行ルートはピンクの実線で示される。自転車は直進するか、右折するオプションがあるが、アルゴリズムは直進する可能性が大きいと判定。このため、Waymoは路上で一旦停止する判断を下した。)

| 出典: Waymo |
ビデオから読み取れる自信
Waymoが公開したビデオを見ると、アルゴリズムは何を見て、どのように運転しているのか、その一端を窺うことができる。そこから、Waymoの技術に対する自信も読み取れ、自動運転車が完成の域に入ったことを感じる。
開発はこれからが本番
ついに、無人タクシーが市街地を走行できるようになったことの意味は大きい。ただ、走行できる範囲はアリゾナ州フェニックスの一部に限定されている。ここは砂漠地帯に作られた街で、天気は良く、自動運転車にとって走りやすい環境である。Waymoは全米の25都市で試験走行を展開しており、難易度が高い地域での無人タクシー運行が次のステップとなる。多くの難題があり、自動運転車の開発はこれからが本番となる。
