ベンチャーキャピタル「500 Startups」は生まれたてのスタートアップに出資し事業立ち上げを支援する。この種のベンチャーキャピタルはアクセラレータ(Accelerator)と呼ばれ、資金を投資するだけでなく、若い起業家に技術を事業に結び付けるプロセスを教育する。起業家は500 Startupsでプロトタイプを開発し、最後にそれを投資家の前で披露する。このイベントは「Demo Day」と呼ばれ、若い起業家が開発した旬のテクノロジーが勢ぞろいした(下の写真)。

| 出典: 500 Startups |
500 Startupsとは
500 Startupsはサンフランシスコに拠点を置くアクセラレータで、起業家にシードファンディングを行ない、技術開発と事業化を支援する。500 Startupsは2010年に創設され、今年で9周年を迎え、ポートフォリオが拡大している。今までに、74か国の2200社に投資し、3000人の起業家が巣立った。Y Combinatorと並びシリコンバレーを代表するアクセラレータで、ここから次のElon Muskの登場が期待されている(下の写真、オフィス内の様子、新興企業は長テーブルで隣り合って技術を開発)。

| 出典: VentureClef |
Demo Day開催
Demo Dayは起業家が開発した製品プロトタイプをベンチャーキャピタリストの前でデモするイベントで、技術開発の締めくくりとなり、アクセラレータ卒業試験の色合いもある。起業家はプロトタイプを3分程度でピッチし、ベンチャーキャピタルから次のフェイズの投資を引き出す。Demo Dayは2019年8月、サンフランシスコのカンファレンス施設「Bespoke」で開催され、会場は立見席も一杯になる盛況で技術発表が進んだ(下の写真)。
Batch 25のデモ
Demo Dayは年間二回開催され、今回のイベントは通算で25回目となり、そのメンバーは「Batch 25」と呼ばれる。定期的にDemo Dayをフォローしているが、今回の特徴は新興企業のレベルが大きく向上したことにある。デモされる技術は完成度が高く、ビジネスに直結するものが多いとの印象を持った。また、新興企業はインターナショナルで米国以外の企業が3割を占めた。更に、女性ファウンダーが目立ち、スタートアップは男性の領域という考え方は崩れつつある。また、技術分野ではAIを使ったプロトタイプが多く、AI人気の高さを裏付けている。

| 出典: VentureClef |
Visionfulという企業
イベントで一番目立ったのが「Visionful」という新興企業だ。Visionfulはサンディエゴに拠点を置き「Autonomous Parking」を開発している。これは自動運転車からヒントを得たソリューションで、AIが駐車場の維持管理を自動運転する。駐車場に設置したカメラの画像をAIが解析し、停められたクルマのIDを把握し、駐車許可証を持っていないクルマがあれば管理者にアラートを発信する。また、これらのデータを解析し駐車場の込み具合を予測する。
ドライバー向け機能
Visionfulはドライバー向けにもソリューションを提供する。ドライバーは専用アプリで近隣の駐車場の空き状況をみることができる。スマホアプリに駐車許可証の種類ごとに空きスロットの数を示す。例えば、一般向け駐車ゾーンの空き状況は39%で、5台分の空きスペースがあるなどと表示される。ドライバーは空きスポットを探して走り回る必要はなく、アプリが示すゾーンに直行してクルマを止める。
管理者向け機能
駐車場管理者向けには駐車場運用状況をリアルタイムで表示する(下の写真)。駐車許可証の種類ごとに込み具合を示し、「B Permit」のエリアでは「80台のスペースに61台駐車」しているなどと表示される。また、駐車許可証を持っていないクルマや制限時間を超えて駐車しているクルマを検知しアラートを発信する。駐車場管理者はこれに従い現場に出向きチケット発行などの措置を取る。

| 出典: Visionful |
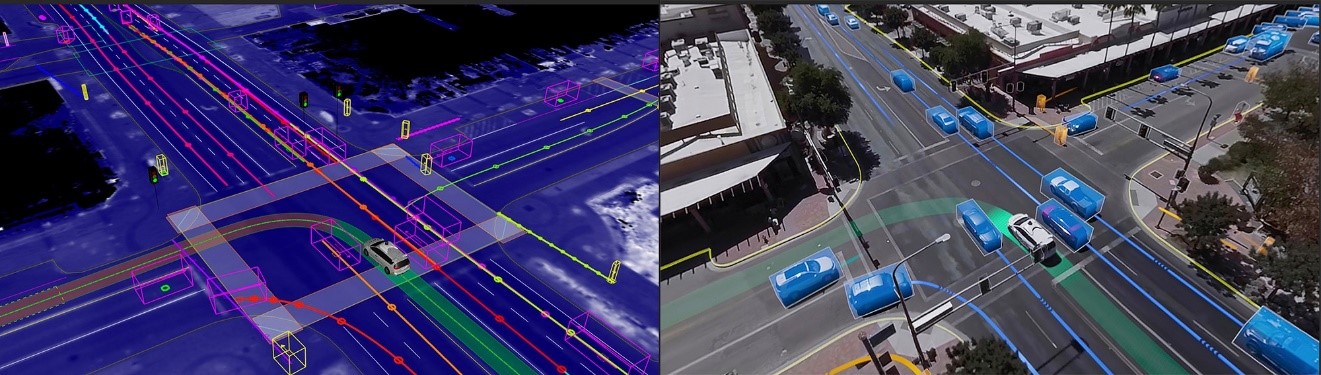
カメラとニューラルネットワーク
このシステムの背後でコンピュータビジョンが使われている。駐車場に設置されたカメラの映像をニューラルネットワーク(Convolutional Neural Network)で解析し、駐車スポットを把握(parking space classification)する。更に、スポットにクルマが駐車されていることを認識し、そのナンバープレートを読む(license plate recognition)。そして、登録車両データベースでナンバープレートをキーに検索し、駐車許可証の種類を把握する。駐車許可証を有しているクルマは緑色で、許可なく駐車しているクルマは赤色で表示される(下の写真)。

| 出典: Visionful |
Edge IoT構成
駐車場にはカメラ「Visionful Edge」が設置される(下の写真、ポールに設置された白色のデバイス)。Visionful Edgeは360度の範囲を撮影できるカメラとプロセッサから構成される。プロセッサはGPUを搭載し、撮影したイメージをニューラルネットワークで解析する。解析したデータは携帯電話回線でクラウドに送信される。これはEdge IoT構成で、デバイス上でAIが画像を解析するので、クラウドへの送信データ量が大幅に低下する。Visionfulは既にカリフォルニア大学サンディエゴ校のキャンパスに導入され実証試験が始まっている。

| 出典: Visionful |
ベンチャーキャピタルの戦略
Visionfulが示すように、Demo Dayに登場した新興企業は確実に進化しており、事業に結び付くプロトタイプの発表が多かった。投資家の視点からは、いかに早い段階で優秀な起業家を掘り出すかの競争が激化している。Y Combinatorや500 Startupsは早い段階で数多くの新興企業に出資し、その多くは失敗するものの、ここから有望な新人の掘り起こしに注力している。ただ、このステージの投資はアクセラレータの独壇場ではなく、今では大手ベンチャーキャピタルも早い段階での投資を始め、次世代を担う技術を探している。投資家たちは競い合って次に来る大きな波を掴もうとしている。