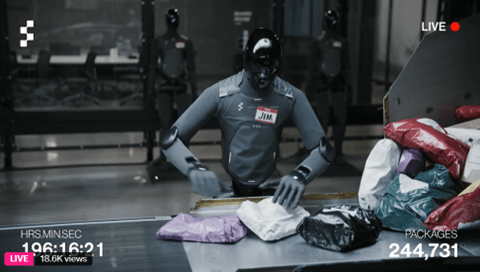
シリコンバレーに拠点を置くスタートアップ企業Figure AIはヒューマノイド・ロボット開発で業界のトップを走っている。最新モデルは「Figure 03」で信頼性が格段に向上し製造工場で活躍している。Figure AIはヒューマノイド・ロボットの性能をベンチマークするために、ソーティング作業を実施し、その様子をライブで配信している(下の写真)。今日は九日目で、24万超のパッケージを処理し、長時間にわたり正常に稼働している。Figure 03は何日間稼働できるのか、米国でこのトライアルが話題になっている。

| 出典: Figure AI |
Figure AIとは
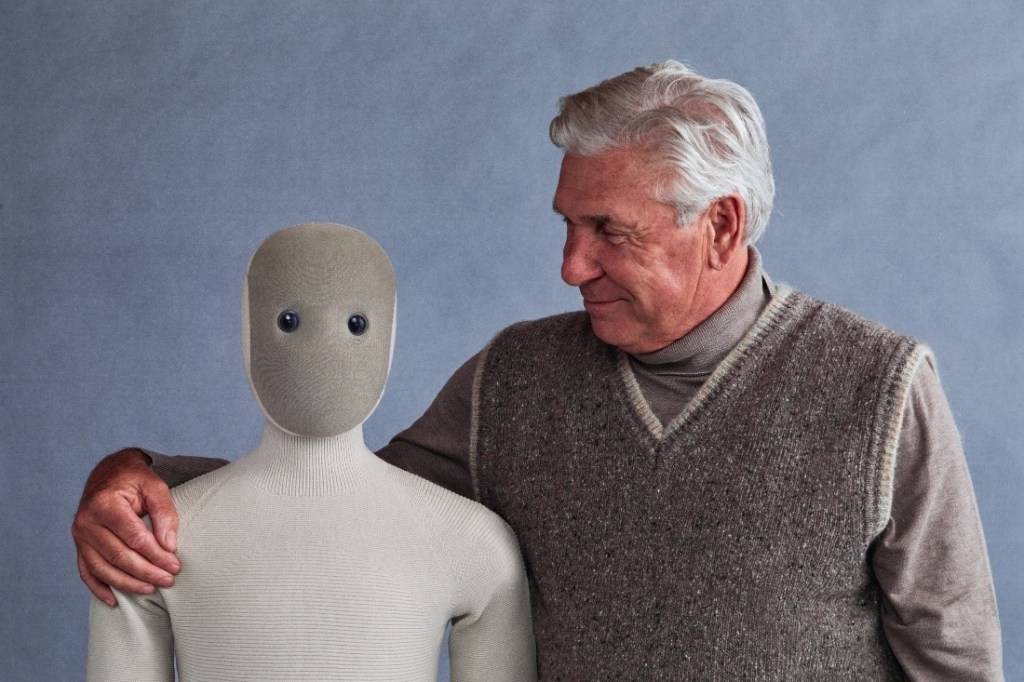
Figure AIはカリフォルニア州サンノゼに拠点を置くスタートアップ企業で、高度なAIモデルをベースにヒューマノイド・ロボットを開発している(下の写真)。このロボットは「Figure 03」と呼ばれ、第三世代のモデルとなる。ハードウェアの改良とAIの進化でエラー率が大きく低下し信頼性が格段に向上した。このモデルは製造工場などに導入され人間に代わりタスクを実行している。Figure 03はプロトタイプの段階からプロダクションモデルに進化し、Figure AIは増産体制に入り年間100万台を生産する。

| 出典: Figure AI |
ソーティング・ベンチマーク
Figure AIはヒューマノイド・ロボットの性能を検証するため、ソーティング・タスクの公開試験を実行している。ベンチマークの状況はライブで配信され、ロボットの稼働状況を見ることができる(下の写真)。このベンチマークは正式には「Continuous Endurance and Autonomy Test」と呼ばれ、ロボットが連続してタスク実行する耐性と自律性が試験される。ロボットが配送センターでベルトコンベアで送られるパッケージをソーティングしその機能が検証される。
| 出典: Figure AI |
検証されるスキル
ロボットはコンベア・ステーションに配置され、ベルトの上を流れるパッケージをハンドリングする。これは配送センタにおける典型的な作業を模したもので、ロボットはパッケージを認識し、それを取り上げ、住所が印字されている面を上に向ける作業となる。パッケージは様々な形状で、ロボットはこれらを認識し作業を進める。特に、プラスティック袋に詰められた柔らかい素材のパッケージはロボットにとって最難関のタスクとなる。パッケージの形状は状況により大きく変わり、ロボットは汎用的なスキルが求められる。
連続作業のチャレンジ
現行のヒューマノイド・ロボットは長時間連続してタスクを実行することができない。一般にロボットは、数時間稼働するとハードウェアで問題が発生し、モーターやアクチュエータなどがオーバーヒートする問題を抱えている。また、センサーがオブジェクトをトラッキングする機能が劣化し正常に稼働できなくなる。Figure 03は信頼性が格段に向上し、今日現在で196時間(9日間)連続で稼働している。
| 出典: Figure AI |
バッテリー交換
このベンチマークでは三台のFigure 03が交代で作業を実行する仕組みとなる。ロボットは5時間おきにバッテリーを交換する必要があり、ベルトコンベアを止めて、背後にスタンバイしているロボットと交代する。バッテリー交換は「ホット・スワッピング(Hot Swapping)」と呼ばれ、
バッテリー・ユニットを取り外し、充電された新しいバッテリーを着装する。バッテリーが取り外された時は、予備電源がキックインしロボットシステムは継続して稼働する仕組みとなる。
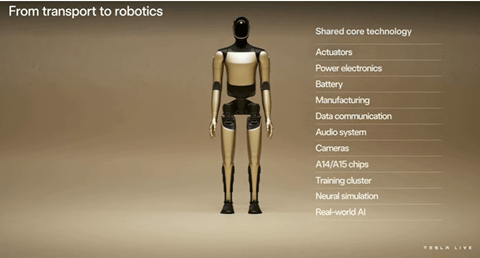
Figure 03の構造
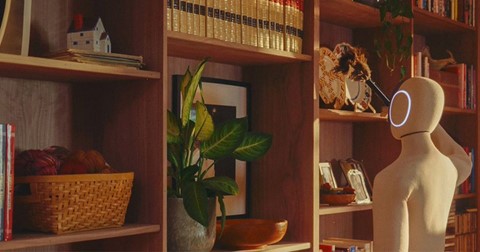
Figure 03は身長が172センチメートル(5フィート8インチ)で、体重が61キログラムと標準的な人間の形状をしている。20キログラムの荷物を持つことができる。家庭環境においてトライアルが進められており、Figure 03が食器のかたずけやテーブルのクリーニングなどを実行する(下の写真)。また、二台のFigure 03が共同で、寝室を整える作業を実行する。今までのヒューマノイド・ロボットは動作が遅かったが、Figure 03は人間レベルの速度で作業をすることができ、技術の進化を実感できる。

| 出典: Figure AI |
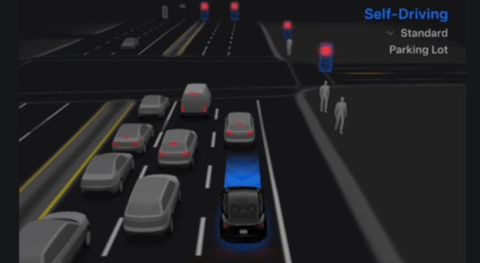
ロボットのブレイン
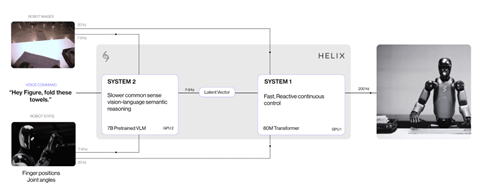
Figure 03を制御するAIは「Helix」と呼ばれ、単一のニューラルネットワークで構成される。Figure 03は「Vision-Language-Action (VLA)」というアーキテクチャを採用し、カメラで捉えたイメージをAI(Helix)で解析し、ロボットを操作するアクションを出力する(下の写真)。Helixは二系統のニューラルネットワークで構成され、それぞれ、「System 2」と「System 1」と呼ばれる。System 2は大型のAIモデルで複雑な命令(タオルを折り畳むなど)を解析し、サブタスクに分解する。System 1がサブタスクを受け、これをアクションに変換し、ロボットを制御する。Figure 03がソーティング作業を人間レベルのスピードで実行できるのは、カメラがステレオビジョンにアップグレードされ、指先の触感センサーが改良されたことによる。
| 出典: Figure AI |
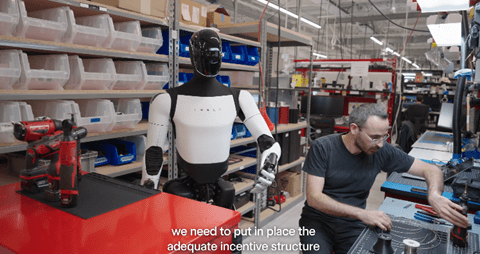
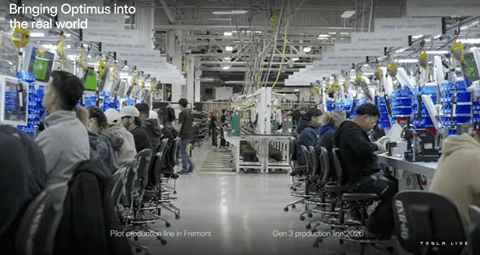
年間100万台生産
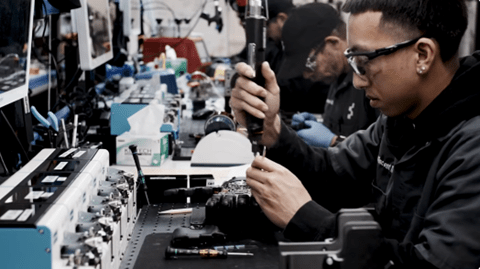
Figure AIはヒューマノイド・ロボットを量産する体制を整備した。生産工場は「BotQ」と呼ばれ、ここでロボットを製造する(下の写真)。今年初旬には一日に1台のロボットを製造するペースであったが、今では1時間に1台のロボットを製造している。Figure AIは年間100万台のヒューマノイド・ロボットを製造するとしている。価格は公開されていないが、Figure 03は13万ドルと言われている。
| 出典: Figure AI |
予想外のペースでロボット技術が進化
今年はヒューマノイド・ロボットが大きくブレークし、実用化に向かって大きく前進する年となる。BMWはFigure 03でクルマの組み立て作業のトライアルを実施してきたが、今年からこれをスケールアップし実用段階に進む。Figure AIはヒューマノイド・ロボットを生産工場だけでなく、家庭や公共施設に展開するビジョンを描いている。ロボットが配送のラストマイルを担い、また、ホテルの運営を全てロボットが取り仕切る(下の写真)。フロンティアモデルの進化でヒューマノイド・ロボットの機能が急成長し、人間と共生する社会が生まれている。

| 出典: Figure AI |