Waymoは開発している自動運転車を無人タクシーとして運行することを発表した。ドライバーが搭乗しない完全自動運転車が市街地を走行する。無人タクシーを利用できる時代が到来した。無人タクシーが移動手段となるが、どう利用すればいいのか分からない。少し気が早いが、自分の街にWaymoがやってきた時に備え、無人タクシー利用手順をマニュアルとして纏める。また、Waymo無人タクシーに乗って大丈夫なのか安全性を評価する。

| 出典: Waymo |
無人タクシーの運行が始まる
Waymoは2017年11月、自動運転車に乗客を乗せ公道で運行すると発表した。運転席にドライバーが乗らない無人タクシーが市街地を運行する。この実証試験は「Early Ride Program」と呼ばれ、Phoenix (アリゾナ州) とそれに隣接する地域で展開される。このプログラムは2017年4月に開始されたが、今月からセーフティドライバーが搭乗しない無人タクシーとして運行される。
【Waymo無人タクシー利用法】
スマホアプリで無人タクシーに乗る
車両は「Chrysler Pacific Hybrid」 ミニバンを改造したものが使われる (上の写真)。利用者はスマホアプリを使って無人タクシーを利用する。Uberを使うときと同じ要領で、現在地と目的地を入力して配車をリクエストする。
クルマに搭乗する
クルマが到着すると利用者は後部座席に座ることとなる。セイフティドライバーやエンジニアは搭乗しないため、運転席と助手席は空席となる。ただし当面の間、セイフティドライバーは最後部座席に搭乗し、運行を監視するとしている。
車内に設置されている機器
車内にはクルマを利用するための機器が設置されている。座席の前にはディスプレイ (In-Car Display) が備え付けられている (下の写真)。ディスプレイにはクルマの走行状態が表示される。
天井部分には操作ボタンが設置されている (下の写真、最上部)。ボタンは四つあり、右から「Start Ride (発進)」ボタン、「Pull Over (非常停止)」ボタン、「Lock/Unlock (ドアの施錠・開錠) 」ボタン、「Help (オペレータとの通話)」ボタンとなる。シートベルトを締め、ドアをロックして、Start Rideボタンを押すとクルマが発進する。

| 出典: Waymo |
ディスプレイに運行状態を表示
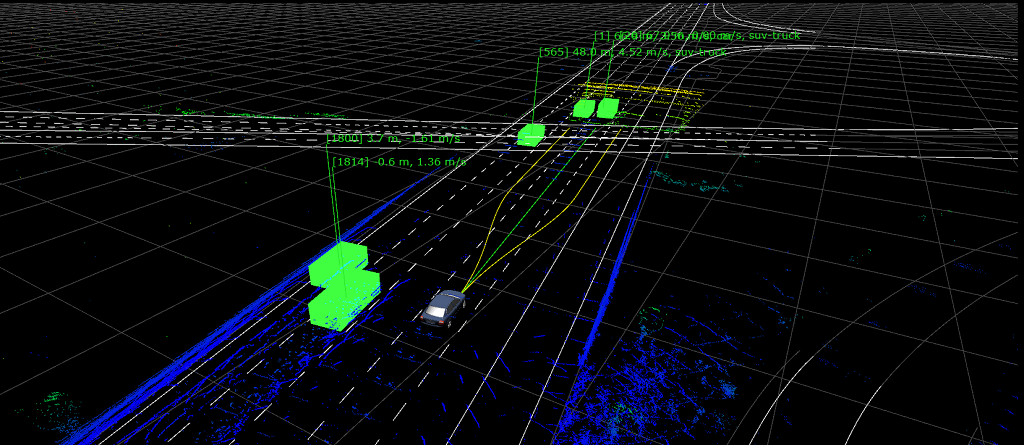
走行中は座席前のディスプレイに運行状態が表示される。画面にマップが表示され、現在地がアイコンで示され、走行ルートが実線で表示される。周囲のオブジェクト (他の車両や自転車など) も表示される。クルマは何を見て、どのような判断を下したかが分かり、安心して運転を任せることができる。この他に、到着予定時間と経過時間なども表示される。
クルマの運行状態を監視室でモニター
Waymoはドライバー無しで走行するが、クルマの運行状態は監視室 (Waymo Operations Center) で遠隔モニターされている。非常事態が発生すると、乗客は「Pull Over」ボタンを押してクルマを停める。「Help」ボタンを押すとWaymo監視室に繋がり、専任スタッフと通話できる。またスマホアプリからも通話できる。クルマの運行状態は監視室で人間がモニターしており、安心感が格段に向上する。
料金はアプリに課金される
クルマは全行程を自動で走行し、目的地に着いたらそこで停止し、乗客は降車する。料金は利用者のアプリに課金される。ただし、Early Ride Programでは料金は無料となっている。利用者はコメントなどをアプリに投稿できる。この手順もUberと同じで戸惑うことはない。
【Waymo無人タクシーはどこを走れるか】
Phoenixで運行する
当初Waymo無人タクシーは運行できる範囲が限られている。現在はPhoenixを中心に運行している。ここは砂漠地帯に作られた街で、天気は良く、雨や雪はほとんど降らない。比較的新しい街で、道路は整備され、自転車や歩行者は少ない。自動運転車にとって走りやすい環境である。
アリゾナ州はハイテク企業を誘致
アリゾナ州知事のDoug Duceyは州知事令 (Executive Order) に署名し、自動運転車の運行を認可した。アリゾナ州は規制を緩和して、ハイテク企業の誘致を進めている。アリゾナ州は地理的な条件だでなく、法令面でも自動運転車にとって走りやすい場所である。(カリフォルニア州は2018年から自動運転車の走行を認める予定。)
Waymoが走れる地域
Waymoはクルマが走れる地域を「Operational Design Domain (ODD)」と定義する。クルマは、地形、道路の種別、気候、昼間・夜間、法令などの条件により、走れる場所が決まる。これら条件を満たす場所がODDとなる。(ODDは携帯電話の圏内に相当する。) 下の写真はそのイメージで、青色で示された部分がODDで、Waymoはこの地域だけを走ることができる。シェイドの部分は整備中の地域で、準備が整い次第走れるようになる。

| 出典: Waymo |
走行できる気象条件
WaymoはODD域内を運行していても、走行できない事象が発生すると、安全に停止するよう設計されている。この状態をMinimum Risk Conditionと呼ぶ。
走行できない事象とは、吹雪や激しい雨などである。例えば、激しい夕立に出会うと、クルマは安全な場所で停止する。この事象が終わると (夕立が止むと) 、クルマは再び運行を始める。
夕立で止まるクルマは商品とは言えず、Waymoは雨や雪が降っても走行できるよう、アルゴリズムの教育を続けている。雨の中の走行試験はワシントン州で、雪の中の走行試験はミシガン州で進めている (下の写真)。

| 出典: Waymo |
道路交通法に準拠
Waymoは道路交通法に従って運行する。道路法規が変わると、それにあわせてソフトウェアを更新する。米国では州により道路交通法が異なるため、Waymoは運行する州の法令に従う。例えば、自転車レーンのある交差点で右折するルールは、カリフォルニア州とテキサス州で異なる。Waymoはこれらの違いをアルゴリズムに盛り込んでいる。更に、Waymoは法令だけでなく、その地域独特の慣習や運転スタイルも取り入れている。
【もし事故を起こしたら】
車両の信頼性
Waymoはドライバーなしで走行するため、車両の信頼性を強化している。クルマの主要システムは二重化され、故障しても、もう一方のシステムで走行を続ける。コンピュータ、ブレーキ、ステアリング、バッテリーなどが二重化されている。
ソフトウェアはドライバーに代わりシステムを常時監視する。ソフトウェアが問題を検出すると、クルマを一旦停車したり、運用を中止する措置を取る。
走行中にデータを収集
クルマは走行中に運行に関するデータを収集する。運行中に遭遇した様々な状況を記録し、それらを解析する。これにより定常的にアルゴリズムを改良し、ソフトウェアが更新される。事故などの問題が発生した際は、記録したデータが原因究明に役立つ。
個人のプライバシーが侵害される事態が起こるとは考えにくいが、搭乗者はクルマの運行が記録されていることを認識しておく必要がある。
事故に遭遇すると
クルマが事故に遭遇すると、ソフトウェアが衝突を検知し、安全に停止する設計となっている。更に、クルマは監視室に問題を連絡する手順となる。
連絡を受けた専任スタッフは、警察や消防と連絡を取り、事故対応 (Post-Crash Procedures) に当たる。更に、その地域のWaymoスタッフが現場に急行する。搭乗者はWaymo車内に設置してあるHelpボタンを押し、専任スタッフと通話することができる。
事故原因の解析
Waymoは収集したデータを解析し、事故の原因を究明する。カメラで撮影されたビデオや、センサーが収集したデータが使われ、事故を引き起こした原因を究明する。Waymoに問題があるときはソフトウェアがアップデートされる。車両ハードウェアは修理され、試験走行を実施し、安全を確認してから運行に戻される。
事故を防ぐためのアルゴリズム
Waymoは事故を防ぐため、また、事故になっても被害を最小にするためのアルゴリズムを搭載している。米国運輸省 (NHTSA) は、国内で発生した交通事故を分析し、事故原因やその頻度を一般に公開している。事故の殆どが、追突事故、交差点内での事故、道路から逸脱した事故、車線変更での事故で発生している。Waymoはこれら四つのシナリオを対象に、事故を防ぐアルゴリズムを開発した。
アルゴリズムの公開と検証
自動運転車ではTrolley Problem (トロッコ問題) が常に話題になるが、Waymoは被害を最小限にするアルゴリズムの詳細は公表していない。(Trolley Problemとは、事故の被害を最小限にするために、特定の人物を犠牲にすることは道義的か、という思考実験。) Waymoを含め自動運転車ベンダーは、事故回避アルゴリズムを公開し、公の機関で検証することが求められる。
【Waymo無人タクシーの運転技能】
自動運転車に必要な運転技能
人間が自動車学校で、運転に必要な技能を学ぶように、Waymoも必要な運転技能を学ぶ必要がある。NHTSAは自動運転車に必要な運転機能を「Behavioral Competencies」として28の項目を定義している。自動運転車として運行するためには、これらの機能を搭載していることが求められる。更に、Waymoは独自に必要な機能を定義し、それらを実装している。Waymoは両者を合わせたドライブテクニックを搭載した車両となっている。
NHTSAが定めている自動運転機能
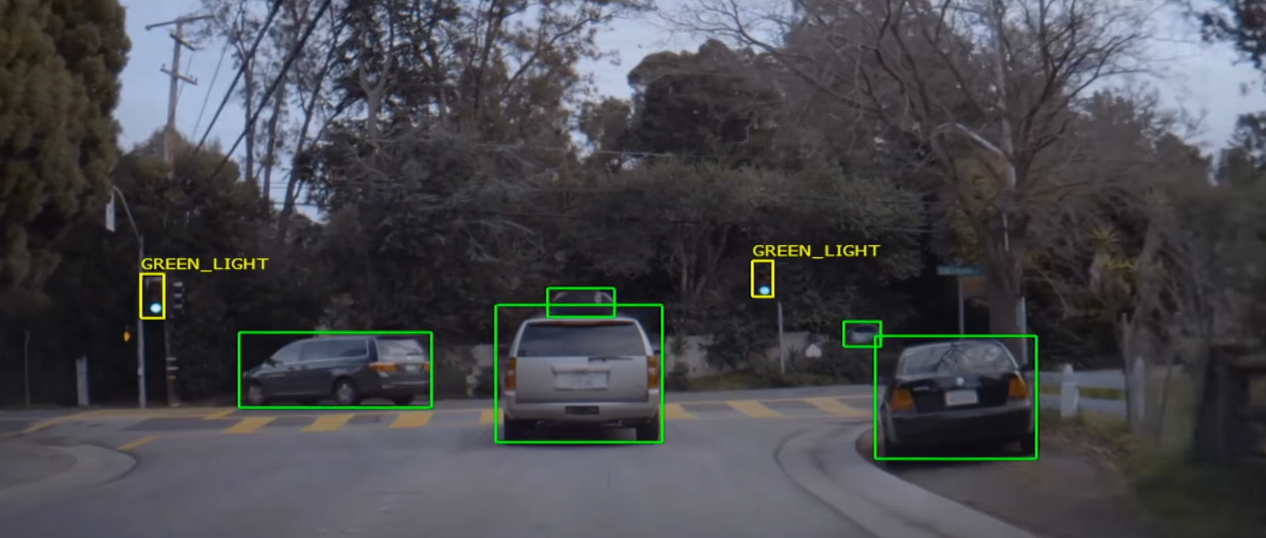
NHTSAが定義する機能は、自動運転の基本操作である。制限速度標識を認識し、これに従う機能を持つことが求められる。フリーウェーで高速で走行車線に行流できることや、緊急車両を検知し、適切な措置を取ることも規定している。
緊急車両の認識とアクション
Waymoは車両の点滅するライトやサイレンを認識し、その意味 (消防車であること) を理解する (下の写真)。これに従いWaymoは、道を譲ったり、路肩に停止する機能を持っている。更にWaymoは、路上の警察官や消防士を認識し、手信号による指示に従うことができる。(一般人が手信号で指示しても、Waymoはこれに従うことはない。)

| 出典: Waymo |
スピード違反で警察に捕まったら
自動運転車が道路交通法違反などで、警察官に停止を命じられる事態への対応も必要になる。Waymoは運行する地域の警察との連携を密にし、無人タクシーへの応対方法などを警察官に教育している。Waymoはドライバー無しで走行できることや、非常事態における連絡方法について説明した。無人タクシーが営業運転を始めると、その地域の警察や消防などとの連携が、極めて重要となる。
Waymoが独自に定めた自動運転機能
Waymoは独自に自動運転に必要な機能を定め、これを実装している。Waymoはスクールバスを認識し、その地域の法令に従い、停止などの措置を取る。Waymoは路上の自転車や動物を検知し、必要な措置を取る。自転車であれば、通常より広めに間隔をとり、また、動物を認識すると、それを避ける動作をする。クルマが運転テクニックをどこまでマスターしているかで、自動運転車の安全性が決まる。これが自動運転車の差別化の要因となる。